Prise en charge de l’interface série BiSS®
Qu’est-ce que l’interface série BiSS ?
Renishaw prend en charge l’interface série ouverte BiSS (unidirectionnelle) pour codeurs absolus. BiSS est une interface série grande vitesse qui convient parfaitement aux axes dynamiques exigeant de fortes accélérations, une régulation de vitesse homogène, une excellente répétabilité bidirectionnelle et une stabilité de positionnement fiable.
Les codeurs absolus Renishaw sont compatibles avec un large choix de contrôleurs, d’entraînements, d’affichages numériques et de cartes de comptage PC compatibles aux normes de l'industrie.
Des options d’interface série propriétaires pour codeurs absolus RESOLUTE™, EVOLUTE™ et FORTiS™ sont également disponibles.
Informations techniques
À propos des codeurs RESOLUTE, EVOLUTE et FORTiS
Les codeurs RESOLUTE, EVOLUTE et FORTiS de Renishaw utilisent l’interface série BiSS C (unidirectionnelle).
Les codeurs RESOLUTE FS et FORTiS FS, pour les applications qui exigent une sécurité fonctionnelle, utilisent l’interface série BiSS Safety.
- Les codeurs rotatifs sont à un seul tour (avec 2n incréments par tour sans décompte des tours).
- Les codeurs linéaires sont disponibles avec différentes résolutions (et des longueurs mesurées maximales) selon les spécifications de la fiche technique du produit.
Description de l’interface BiSS C
Le protocole BiSS C (unidirectionnel) est une interface série synchrone à grande vitesse de type maître-esclave qui permet d’acquérir des données de position provenant d’un codeur.
Le maître synchronise l’acquisition des données de position et la vitesse de transmission des données,
le rôle d’esclave étant assuré par le codeur. L’interface consiste en deux paires unidirectionnelles et différentielles de lignes :
- « MA » transmet les demandes d’acquisition de position et les informations de synchronisation (horloge) du maître au codeur.
- « SLO » transfère les données de position du codeur au maître, synchronisé avec « MA ».
Le schéma ci-dessous montre les données transmises.
Format de données

Description de l’interface BiSS Safety
BiSS Safety est une interface série synchrone à grande vitesse qui permet d’acquérir des données de position provenant d’un codeur dans des applications qui exigent une sécurité fonctionnelle. Les codeurs RESOLUTE FS et FORTiS FS utilisent des communications BiSS Safety et sont certifiés aux normes de sécurité fonctionnelle suivantes :
- ISO 13849 Catégorie 3 PLd
- CEI 61508 SIL2
- CEI 61800-5-2 SIL2
BiSS Safety est une interface maître-esclave. Le maître synchronise l’acquisition des données de position et la vitesse de transmission des données, le rôle d’esclave étant assuré par le codeur. L’interface consiste en deux paires unidirectionnelles et différentielles de lignes :
- « MA » transmet les demandes d’acquisition de position et les informations de synchronisation (horloge) du maître au codeur.
- « SLO » transfère les données de position du codeur au maître, synchronisé avec « MA ».
Le schéma ci-dessous montre les données transmises.
Le format de communication des signaux maitres-esclaves est RS485 / RS422 à pilotage par ligne différentielle.
Format de données
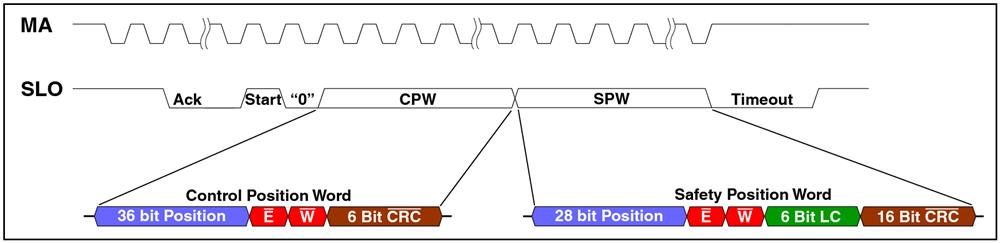
Un cycle de demande habituel se déroule comme suit :
- Au repos, le maître maintient MA à l’état haut. Le codeur indique qu’il est prêt en maintenant SLO à l’état haut.
- Le maître demande l’acquisition de la position en démarrant la transmission d’impulsions d’horloge sur MA.
- Le codeur répond en réglant SLO à l’état bas sur le second front montant sur MA.
- Une fois la période « Ack » terminée, le codeur transmet des données au maître synchronisé avec l’horloge, comme le montre le schéma ci-dessus.
- Quand toutes les données ont été transférées, le maître arrête l’horloge et règle MA à l’état haut.
- Si le codeur n’est pas encore prêt pour le cycle de demande suivant, il règle SLO à l’état bas (période de temporisation).
- Quand le codeur est prêt pour le cycle de demande suivant, il en informe le maître en réglant SLO à l’état haut.
Codeurs absolus ouverts RESOLUTE avec BiSS C et BiSS Safety
| Versions RESOLUTE | Options système |
| Standard | |
| Ultravide (UHV) | |
| Gamme de température étendue (ETR) | Anneaux rotatifs (angulaires) |
| Sécurité fonctionnelle (FS) |
Codeurs absolus ouvert EVOLUTE avec BiSS C
| Versions EVOLUTE | Options système |
| Standard |
Codeurs absolus hermétiques FORTiS avec BiSS C et BiSS Safety
| Variantes FORTiS | Options système linéaire |
| Standard | |
| Sécurité fonctionnelle (FS) |


