Comment fonctionnent les systèmes interférométriques ?
Comment fonctionne l'interférométrie ?
Introduction
Inventé par Albert Abraham Michelson en 1887, premier américain lauréat du prix Nobel de physique, l'interféromètre de Michelson est l'outil d'interférométrie le plus commun. Nous lui devons l'invention d'un système de miroirs et de miroirs semi-transparents (séparateurs de faisceau), permettant de fusionner des faisceaux lumineux séparés provenant de la même source. L’interférométrie laser est une méthode bien établie pour mesurer les distances avec grande précision.
Principes de base
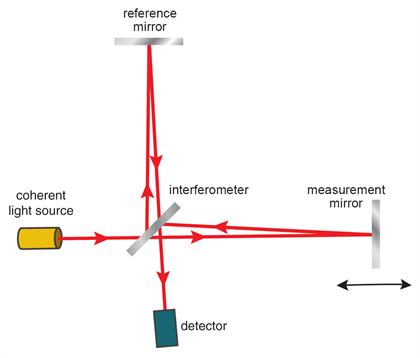
À la base, l'interféromètre de Michelson sépare un faisceau unique provenant d'une source de lumière cohérente en deux faisceaux identiques. Chaque faisceau suit alors son propre chemin optique. Ils sont ensuite recombinés avant d'arriver à un détecteur. La distance différente parcourue par chaque faisceau crée une différence de phase entre eux. Cette différence de phase produite crée le schéma d'interférence entre les ondes identiques au départ et identifié par le détecteur. Si un faisceau unique est séparé sur deux chemins séparés (mesure et référence), la différence de phase indique l'occurrence d'un événement à l'origine d'une modification de la phase au cours de ce cheminement. Il peut s'agir d'une modification physique de la longueur du chemin lui-même ou d'un changement d'indice de réfraction au passage du faisceau.
Interférométrie de Michelson
Le faisceau laser (1) sort de la source laser ; il est séparé en deux faisceaux (référence (2) et mesure (3)) au départ de l'interféromètre. Ces faisceaux sont renvoyés par les deux rétroréflecteurs, se rejoignent à l'interféromètre avant d'arriver au détecteur.
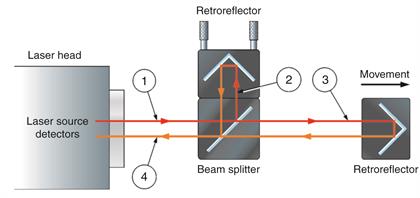
Les rétroréflécteurs permettent de faire en sorte que les faisceaux provenant des bras de référence et de mesure soient parallèles, au moment où ils se rejoignent à l'interféromètre. Les faisceaux recombinés arrivent au détecteur où ils interfèrent entre eux, de manière constructive ou destructive. Pendant l’interférence constructive, les deux faisceaux sont en phase ; les crêtes des deux faisceaux se renforcent réciproquement en produisant une frange lumineuse. Pendant l’interférence destructive en revanche, les faisceaux sont déphasés. Les crêtes d’un faisceau sont annulées par les creux de l’autre faisceau ce qui produit une frange sombre.
Traitement du signal
Le traitement du signal optique par le détecteur permet de constater l’interférence de ces deux faisceaux. Le déplacement du faisceau de mesure modifie la phase relative des deux faisceaux. Ce cycle d’interférences destructive et constructive soumet l’intensité de la lumière recombinée à une variation cyclique. Un cycle de variation d'intensité de l'état lumineux à l'état sombre se produit, à chaque fois que le faisceau de mesure/rétroréflecteur (3) se déplace d'une valeur correspondant à la moitié de la longueur d'onde du faisceau laser.
Précision du système
La précision des mesures de positions linéaires dépend du degré d'exactitude de la longueur d'onde du faisceau laser connue. La longueur d’onde opérationnelle du faisceau laser dépend de l’indice de réfraction de l’air traversé par le faisceau, sachant que la température de l’air, la pression atmosphérique et l’humidité relative jouent sur cet indice. Par conséquent, la longueur d’onde du faisceau doit être modifiée (par compensation) pour incorporer les changements de ces paramètres, le cas échéant.
Systèmes RLE
Le système RLE est un système interférométrique laser homodyne perfectionné, conçu spécialement pour des applications de renvoi de position. Chaque système RLE se compose d'une unité laser RLU et d'une ou deux têtes de détection RLD10, dont le modèle dépend des critères de l'application spécifique.
Principal :
Comment fonctionne le RLE ?
| Source laser | Couplage de fibre | Optiques d'interféromètre | Optiques de mesure | Schéma de détection | Signaux de renvoi de données du codeur |
 |  |  |  |  |  |
Comment fonctionne le RLU ?
Sortie laser du RLD au RLD
| Source laser | Composants électroniques de stabilisation | Couplage de fibre | Stabilité d'orientation du faisceau |
|  | |  |
Traite le renvoi du signal au RLD
| Signaux d'erreur du codeur | État système | Interpolation numérique | Signaux analogiques de codeur |
|  |  |  |
Comment fonctionne le RLD ?
Sortie laser du RLD aux optiques de mesure
| Optiques d'interféromètre | Orienteur de faisceau |
Schémas optiques uniques à erreur de subdivision réduite au minimum, compatibles avec les optiques de mesure à miroir plan ou rétroréflecteur |  Tête d'orientation intégrée, utilisée pour réduire au minimum le temps d'installation en simplifiant le réglage angulaire du faisceau |
Entrée laser des optiques de mesure au RLD
| Signaux analogiques de codeur | Schéma de détection | Optiques de mesure |
 Quadrature analogique intrinsèque, produite par le schéma de détection et transférée directement au RLU | Le schéma de détection de frange intégré convertit en signal électronique les franges d'interférence des faisceaux de mesure et de référence | Miroirs diélectriques hautement réfléchissants, revêtus d'oxyde dur |
Systèmes HS20

La tête laser HS20 Renishaw combinée à un kit optique linéaire, constitue un système de codage laser interférométrique sans contact, pour applications de renvoi de données de positions linéaires haute précision sur axes longs.
La tête laser HS20 peut être incorporée à la boucle de commande de position de n'importe quel système d'asservissement, pouvant être configuré pour accepter les signaux de codeur aux formats de quadrature numérique ou analogique. La tête laser peut être installée en remplacement direct d'un système de codeur linéaire, pour applications OEM et rétromontées.
Comment fonctionne le HS20 ?
| Source laser | Composants électroniques de stabilisation | Optiques de mesure | Signaux | Signaux de renvoi de position du codeur |
 Laser stabilisé Classe 2 (<1 mW) HeNe |  Servant au contrôle de la stabilité de fréquence laser, en modulant l'élément chauffant du tube laser |  Solutions d'optiques longue portée pour les longueurs d'axe machine jusqu'à 60 m |  Des lignes d'erreur actives, propres à chaque axe laser, peuvent être facilement intégrées aux commandes de la machine pour une utilisation en boucle fermée |  Quadrature standard numérique ou analogique aux normes industrielles, pour renvoi de position haute résolution |
Systèmes de compensation
Les interféromètres laser sont souvent considérés comme étant automatiquement capables de s'acquitter de mesures d'une précision exceptionnelle. Toutefois dans la pratique, la situation est plus compliquée. Dans les scénarios de mesure de déplacements linéaires dans l'air avec un laser, l'efficacité du système de compensation de l'environnement est primordiale. Le laser et les optiques de mesure interférométrique s'acquittent de très hauts niveaux de résolution et de précision linéaires, mais pour les applications « in air », la précision de mesure des systèmes dépend surtout de l'unité de compensation de l'environnement.
Le déplacement s'exprime en termes de longueur d'onde spécifiée. Il va donc de soi que les mesures précises et répétables dépendent de la régularité de la longueur d'onde. En traversant l'air, la longueur d'onde du faisceau laser varie en fonction de l'indice de réfraction.D'un autre côté, la mesure du codeur ne tient pas compte de la dilatation thermique de la pièce à usiner ou de la structure de la machine.
Afin de compenser la source d'erreur ci-dessus et de garantir le plus haut niveau de précision possible dans les applications « in air », un système de compensation s'impose.
Facteurs environnementaux ayant une incidence sur la précision
Facteurs d'indice de réfraction :
 |  |  |
Température de l'air | Humidité relative | Pression atmosphérique |
Dilatation thermique :
 |
Température matériau |
Système de compensation RCU10
Le système de quadrature en temps réel RCU10 évite les sources d'erreur d'environnement de mouvements linéaires des systèmes à mouvement linéaire, d'où une amélioration des niveaux de précision et de répétabilité des processus.Le RCU10 surveille l'environnement ambiant d'une machine grâce à plusieurs capteurs et se sert du traitement de signaux numériques sophistiqué pour exécuter la compensation en temps réel des signaux de renvoi de position. L'unité fournit les signaux de renvoi corrigés au contrôleur de mouvement, aux formats numérique ou analogique.

Comment fonctionne le RCU10 ?
Le diagramme ci-dessous illustre le flux de travail du RCU10.
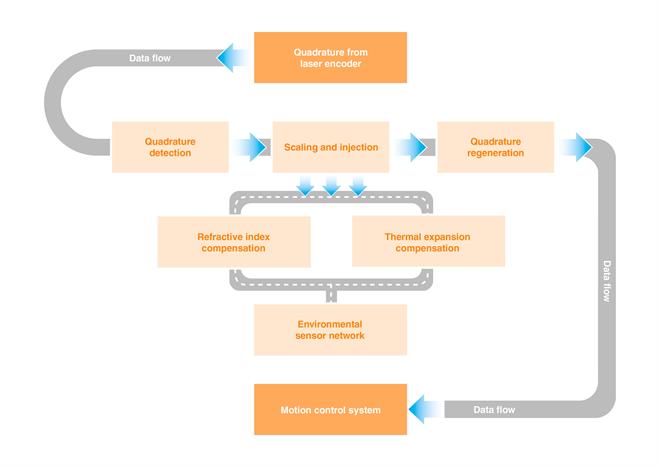
L'unité de compensation RCU10 accepte la quadrature numérique, ainsi que les données sur l'environnement recueillies par plusieurs capteurs, afin de calculer le degré de compensation nécessaire pour corriger la position de l'axe. La compensation déduite est ensuite appliquée par mise à l'échelle et injection de quadrature (ajout ou suppression d'impulsions de quadrature) au signal de renvoi du codeur. L'ensemble du processus s'exécute avec un minimum de latence au contrôleur de mouvement. Les signaux de renvoi corrigés sont fournis au contrôleur de mouvement, aux formats numérique ou analogique.